
 English
English Español
Español Deutsch
Deutsch
-1")




Specification decisions around a crawler gear in a truck system rarely come from a single department within a fleet operation, since the requirement usually surfaces from whoever directly experiences ...
READ MORERobotics & Automation Gears (Machine-tool Drives)
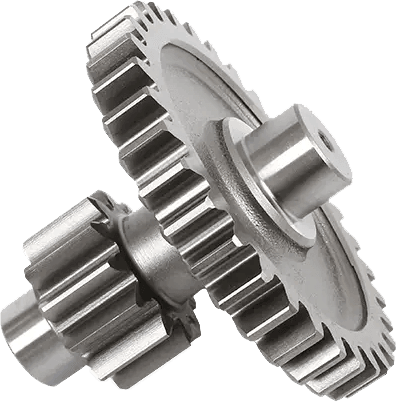
In industrial robots, machine tools and automation drives, Robotics & Automation Gears (Machine-tool Drives) must deliver stable meshing, long life and dependable supply. Key priorities are positioning stability, low vibration, and repeatability for repeatable parts in series production. Common deliverables include precision spur/helical gears, splined shafts, and drive gears. Haoshun Gearworks supports programs with practical DFM feedback and repeatable production control.
Our approach prioritizes repeatability: controlled heat treatment, accurate interfaces, and inspection checkpoints that match the drawing requirements. Depending on the design, we use forged blanks or bar stock, then apply controlled heat treatment to balance hardness and toughness. Machining focuses on interface accuracy, and tooth finishing is selected to match your noise and life targets. We verify critical dimensions and interface fits so your assembly line sees predictable parts, batch after batch.
We support prototypes through mass production with clear communication, documentation, and packaging tailored for overseas logistics. Documentation such as material certificates (EN 10204 3.1), inspection reports, and warranty letters is available for approval workflows. As an export-focused gear manufacturer, Haoshun Gearworks supports OEM and gearbox customers with stable supply and responsive communication. For repeat orders, we keep process parameters stable to reduce variation and shorten re-approval cycles.
About

Zhejiang Haoshun Machinery Technology Co., Ltd.
Zhejiang Haoshun Machinery Technology Co., Ltd. is located in Taizhou Bay Industrial Park, Jiaojiang District, Taizhou City, Zhejiang Province. Spanning a total area of more than 56,000 square meters and featuring a substantial building area of 70,000 square meters, the company is a technology-based enterprise specializing in the production of precision gears, shafts, gear sleeves, gear rings, and a variety of other essential components. These products serve a broad spectrum of industries, including automotive, agricultural machinery, construction machinery, and reducer applications.
At the core of the company's strength lies its advanced production and testing equipment, which together form a comprehensive closed-loop production system. Every stage of manufacturing, from blank forging to rough machining, precision machining, and heat treatment, is conducted in-house, ensuring rigorous quality control and high-efficiency output. This vertically integrated approach allows the company to maintain superior product consistency and accelerate delivery times while meeting the evolving demands of clients.
Supporting this robust manufacturing infrastructure is a highly skilled team of 360 employees, including 15 senior and intermediate technical personnel and 25 professionals dedicated to quality management and inspection. Their collective expertise continuously refines the company's product design and manufacturing capabilities, ensuring that every component is produced with exceptional precision and performance reliability.
Haoshun Machinery's product portfolio finds extensive application across multiple sectors. By supplying critical drivetrain components to the automotive, agricultural machinery, construction machinery, and reducer industries, the company has developed the flexibility to offer customized gear products and integrated solutions tailored to the specific needs of diverse clients.
Financially, the company has demonstrated robust growth with annual sales revenue reaching 450 million RMB. This success is underpinned by a lean and agile operational team that has forged enduring partnerships with major OEMs and industry-leading clients, further solidifying the company's reputation as a reliable and strategic partner.
Quality assurance remains a cornerstone of Haoshun Machinery's operations. Since achieving IATF 16949 certification in 2013, the company has embedded a comprehensive quality management system across all levels of its workforce, ensuring that every product leaving the facility conforms to stringent international standards. This commitment to excellence has earned the company multiple accolades, including recognition as a Top 100 Chinese Quality Credit Enterprise, an AAA-level Credit Enterprise, and an Outstanding Enterprise.
Looking ahead, Zhejiang Haoshun Machinery Technology Co., Ltd. remains steadfast in its guiding philosophy of “Innovation-driven, Quality First.” The company is committed to advancing its research and development capabilities, expanding its presence in both domestic and international markets, and striving to become a globally recognized leader in gear and transmission system solutions. Through continuous innovation and an unwavering focus on customer satisfaction, Haoshun aims to deliver not only high-quality, high-precision Robotics & Automation Gears (Machine-tool Drives) but also comprehensive technical support and tailored solutions to clients around the world.
Certificate Of Honor
News
-
-
Bore tolerance rarely gets discussed outside engineering drawings, yet it determines whether a hollow output shaft performs reliably in service or introduces vibration and premature wear that shows up...
READ MORE -
Heavy vehicle engineers rarely talk about top speed when they discuss a crawler gear in truck applications, because the entire point of this gear range is the opposite: moving forward at walking pace ...
READ MORE -
Torque transmission looks straightforward from a distance, but the moment a design engineer needs to route a cable, shaft, or pipe through the center of a rotating assembly, a hollow output shaft beco...
READ MORE -
Transmission Gears in industrial systems are rarely evaluated only at the installation stage. In many production lines and mechanical assemblies, what matters more is how gear behavior changes once co...
READ MORE -
A companion flange is rarely the component that brings a machine into the workshop. Technicians are usually called because of vibration, leakage, unusual drivetrain behavior, or wear discovered elsewh...
READ MORE -
An experienced mechanic once described a gearbox inspection in a way that surprised a younger technician. Before opening the housing, he simply stood beside the vehicle and listened. Not for a loud fa...
READ MORE -
A transmission gear shaft rarely attracts much attention during daily operation. When a gearbox is running smoothly, technicians are usually focused on noise levels, temperature readings, lubrication ...
READ MORE -
Inside many transmission systems, noise rarely appears suddenly. Operators may only hear a light rhythmic sound during acceleration or notice slight vibration at certain rotational speeds. Weeks later...
READ MORE -
In heavy industrial machinery systems, gear assemblies play a pivotal role in power transmission and torque distribution. Given that their operating environments typically involve high loads and prolo...
READ MORE -
In the powertrain systems of commercial electric vehicles, the reduction gearbox serves as a critical link in power transmission. Its primary function is to modify the high-speed, low-torque output ge...
READ MORE -
Industrial power transmission systems play a vital role in the energy conversion and transfer processes within various types of mechanical equipment. Among their core components, gears hold fundamenta...
READ MORE
Industry knowledge
When robots perform operations such as handling, assembly, welding, or inspection, they rely on multi-stage transmission structures to convert the power output from the motor into joint movement. The role of the gear system in this process extends beyond simple speed conversion to include the adjustment of motion direction and the distribution of torque. Through various gear combinations, robots can achieve high-precision positioning and repeatable motion control, thereby ensuring coordination among their various joints.
Main Types of Robotic Gear Transmissions
Common forms of gear transmission utilized in industrial robots include spur gears, helical gears, and harmonic gear structures. These different structures exhibit distinct differences in their motion characteristics and application contexts.
Spur gear structures are relatively simple and are suitable for basic transmission modules. Helical gears, due to the angled contact of their tooth surfaces, enable smoother power transmission and are frequently employed in joint drive mechanisms. Harmonic gears are good suited for scenarios requiring high reduction ratios and high-precision positioning.
These various gear structures are distributed across the different joints of a robot, collectively forming a complete power transmission system.
Structural Components of the Transmission System
The gear transmission system in an industrial robot typically consists of an input shaft, a reduction gear train, an output shaft, and supporting bearings. Power transmission is achieved through the precise mating and interaction of these various components.
The input shaft connects to the drive motor, transmitting rotational power to the gear train. The gear train utilizes multi-stage meshing to achieve speed adjustment and torque conversion. The output shaft then transmits this conditioned power to the joints of the robotic arm.
Bearing structures serve to support the rotating components, small frictional resistance, and enhance operational stability. The entire system requires a high degree of assembly precision to ensure consistent motion performance.
The Role of Gears in Robotic Motion Control
When executing tasks, industrial robots are subject to stringent requirements regarding motion trajectories and positioning accuracy. Through a stable mechanical structure, the gear transmission system converts the motor's rotational motion into precise angular displacements.
In multi-joint robots, each joint may incorporate an independent gear reduction mechanism. These mechanisms work in concert to enable the robot to execute complex movements.
The precision of gear meshing directly impacts motion error; therefore, during the design phase, it is essential to strictly control tooth profile accuracy and backlash tolerances.
Material Selection and Manufacturing Characteristics
Gears used in industrial robots are typically fabricated from high-strength alloy materials or heat-treated metals. These materials exhibit good fatigue resistance, making them suitable for environments requiring long-term, continuous operation.
The surfaces of certain gears undergo carburizing or nitriding treatments to enhance surface hardness and improve wear resistance. Meanwhile, the gear interiors retain a degree of toughness to accommodate impact loads.
During the manufacturing process, gear machining precision is a critical factor. High-precision machining smalls meshing errors, thereby enhancing the smoothness of motion.
Lubrication and Operational Stability
When gears operate under high-speed or heavy-load conditions, they generate frictional heat; consequently, the lubrication system plays a vital role within a robot's transmission structure.
Lubricating oil forms a protective film on the gear meshing surfaces, preventing direct metal-to-metal contact and thereby reducing the rate of wear. Additionally, lubrication facilitates heat dissipation, helping to maintain system temperature stability.
Variations in lubrication conditions can affect gear operational noise and efficiency; therefore, regular maintenance is essential.
Comparative Analysis of Gear Transmission Structures
The table below outlines the fundamental characteristics of common gear structures found in industrial robots:
| Gear Type | Structural Characteristics | Precision Performance | Load-Bearing Capacity | Operational Smoothness | Typical Application |
| Spur Gear | Parallel tooth surface meshing | Moderate | Moderate | Average | Basic transmission modules |
| Helical Gear | Angled tooth surface contact | Good | High | Good | Joint drive systems |
| Harmonic Drive | Flexible deformation meshing structure | High | Moderate | Good | Precision positioning joints |
Different structures fulfill distinct functions within a robotic system and must be selected and matched based on specific precision and load requirements.
Motion Errors and Structural Influencing Factors
During the operation of an industrial robot, the gear transmission system can be influenced by various factors, including machining errors, assembly deviations, and operational wear.
These factors can minute variations in gear backlash (clearance), thereby affecting the positioning accuracy of the end effector. This is particularly critical in multi-stage transmission structures, where errors can accumulate cumulatively through each stage.
Consequently, during the design phase, the entire transmission chain must be optimized to mitigate the propagation of errors.
Structural Components and Functions
Within an industrial robot automation system, the gear transmission structure facilitates power conversion through multi-stage mechanical meshing; its core function is to enhance the precision and stability of motion control.
Different types of gears perform distinct roles across various robotic joints, covering the full spectrum from basic power transmission to high-precision positioning. Through sound design and appropriate structural matching, robots can maintain stable and reliable operation across a wide range of industrial environments. As a vital component of a robot's power train, the gear system—through its structural design and operational status—directly influences overall performance, making it a critical link within automation systems that cannot be overlooked.

Submit feedback
Let’s Build Your Perfect product.
-
William Weber:
Phone: +86-13968651722
E-mail: sales01@hsgearworks.com -
Flora:
Phone: +86-13738533719
E-mail: sales05@hsgearworks.com -
Address:
No.9 East Section, Jianan Avenue, Taizhou Bay New District, Taizhou City, Zhejiang Province, China, 318052
Copyright @ Zhejiang Haoshun Machinery Technology Co., Ltd. All Rights Reserved.
Industrial Robot Gears Manufacturer
